
|
I am Ramanan, a Senior Machine Learning Engineer at Qualcomm, working on ML Systems R&D in the Autonomous Driving team. I'm broadly interested in the intersection of Deep Learning and Robotics, and greatly enjoy exploring different problems in this space. I currently work on developing and optimizing deep learning workloads as part of the autonomous driving stack at Qualcomm, with hardware-software co-design. This involves designing and training deep learning models in a hardware-aware fashion such that they are effectively executed on-target, specifically onto the Snapdragon Ride platform. As a part of this effort, I lead the Neural Architecture Search team, where we currently work on optimizing the perception stack for efficient deployment. Our work has produced some of the fastest and performant models on Qualcomm's devices, among the larger model zoo. On top of this, I also work on efficient model deployment problems such as quantization and compression, which has lead to development of useful analysis tools towards understanding profiling bottlenecks, quantization errors, accuracy tracking and debugging tools. I graduated with a Master's degree in Robotics at the GRASP Lab at the University of Pennsylvania. I was advised by Kostas Daniilidis, and worked with his research group on problems related to robotics and reinforcement learning with intrinsic rewards.I received my Bachelor's degree in Electrical Engineering at Anna University in India, with my Senior Project advised by Ranganath Muthu. I have spent time as a Research Intern with P.V.Manivannan at IIT Madras working on developing classical SLAM algorithms and deploying them on real robots, and as a Research Fellow with Urbasi Sinha at Raman Research Institute working on Quantum Key Distribution. I have also spent time at Qualcomm R&D working on using Deep Learning for error-correction codes. |
 |
webpage |
code |
pdf |
arXiv |
video |
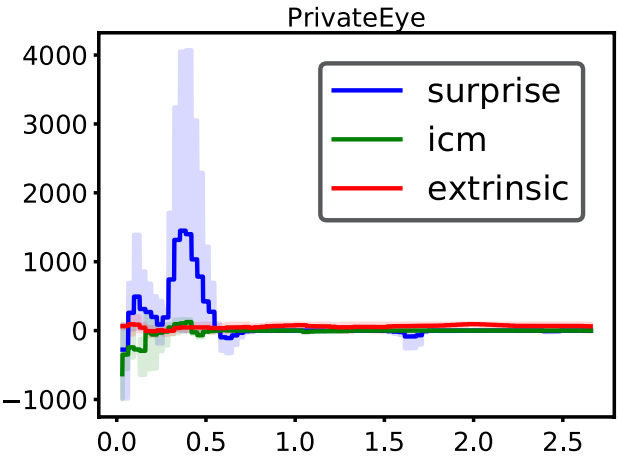
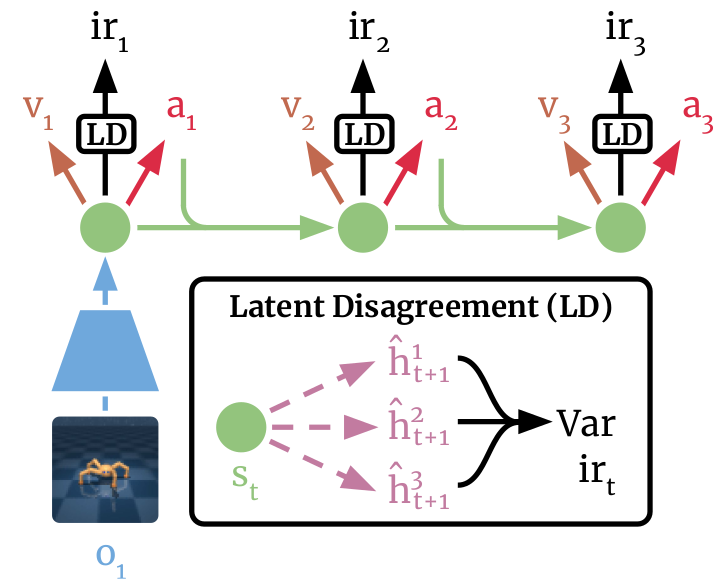
In the Media: | VentureBeat | Synced | Reddit | Paper Review | We propose a model-based agent for self-supervised reinforcement learning. Our agent is able to adapt in a zero/few-shot setup, achieving comparable performance to supervised state-of-the-art RL. |
 |
workshop page |
pdf |
We learn a latent variable model for dynamics of image observations, and use it to construct an agent that maximizes Bayesian surprise of the future frames. The Bayesian agent can perform exploration that is more robust in stochastic environments than simpler prior prediction schemes. |
 |
conference |
pdf |
code |
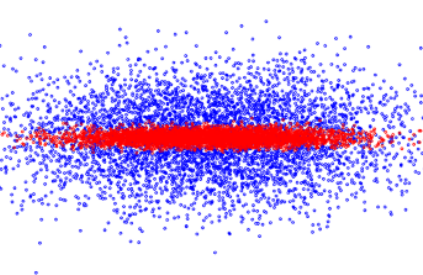
We mathematically analyze the correlations that arise between measurement parameters. This is done by understanding the geometrical transformations that a data point undergoes when correlations are determined between normally distributed measurement parameters. We use this understanding to develop a new algorithm for the discrete Kalman Filter |
 |
conference |
pdf |
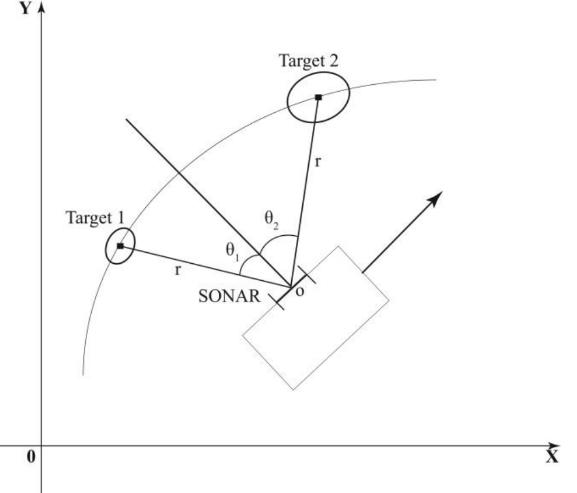
We propose a solution to reduce the range and bearing error significantly, and thus improve the performance of the SONAR. Using the results from the Gaussian Correlation Inequality, we derive probabilistic transformations that can improve the range and bearing measurement of the SONAR, thus reducing the sensor error. |
 |
pdf |
QKD, a sub-topic of quantum cryptography, stands strong in its security only bounded by the laws of physics, meaning no matter how ad- vanced the technology gets, what is prohibited will be prohibited. This report outlines the fundamentals of the BB84 scheme and its problems, how the decoy state idea proved to be a worthy solution, along with some mathematical background and two important experimental milestones |
 |
pdf |
Thesis Talk |
This work focuses on task-agnostic exploration, where an agent explores a visual environment without yet knowing the tasks it will later be asked to solve. |
 |
pdf |
presentation |
This project work is an implementation of a collaborative robot system that help overcome the challenges in disaster rescue, where there is a focus on the application of autonomously searching and rescuing people in disaster zones such as earthquakes with unmanned aerial vehicles (UAV) and unmanned ground vehicles (UGV) in unknown and unstructured environments |